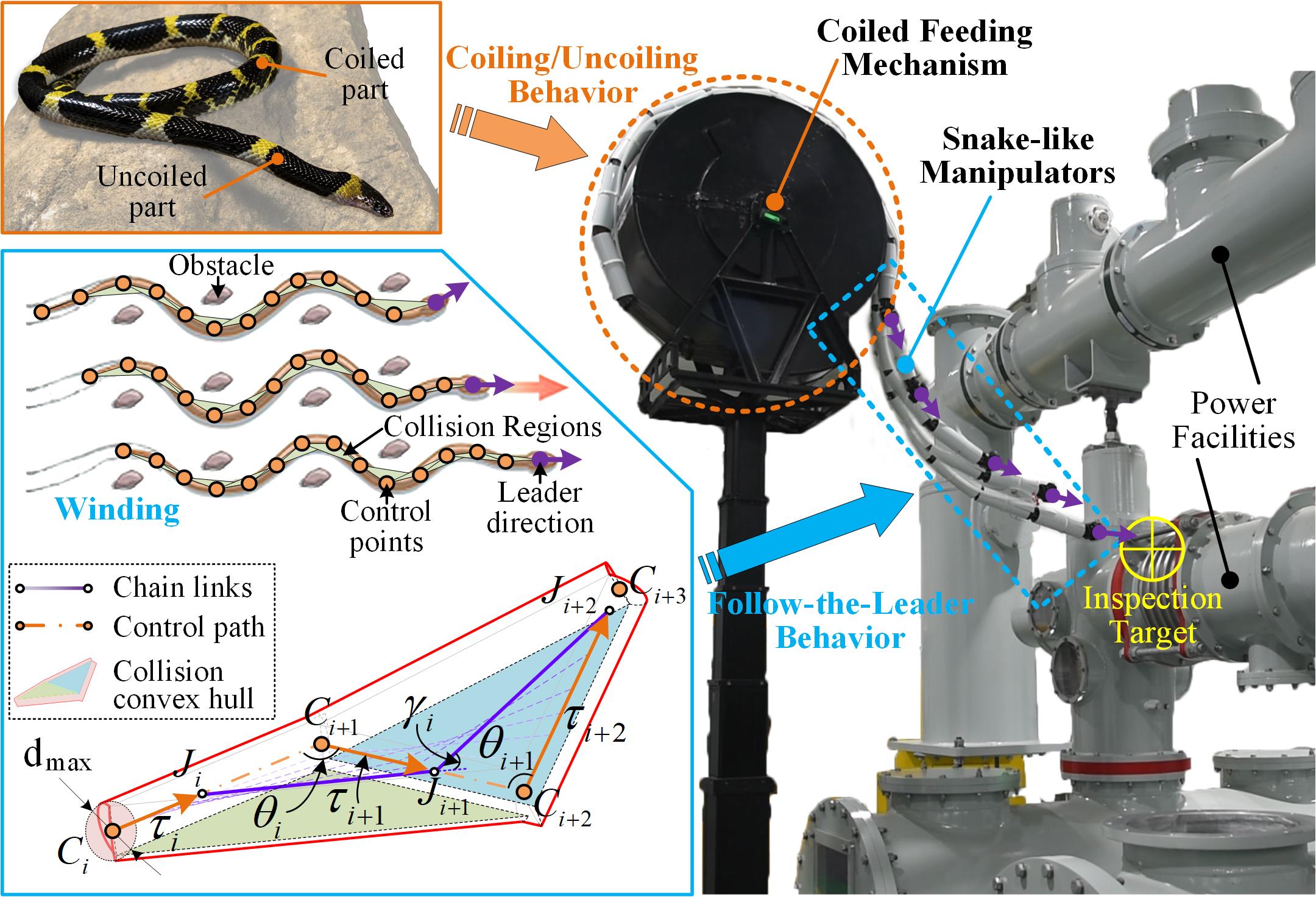
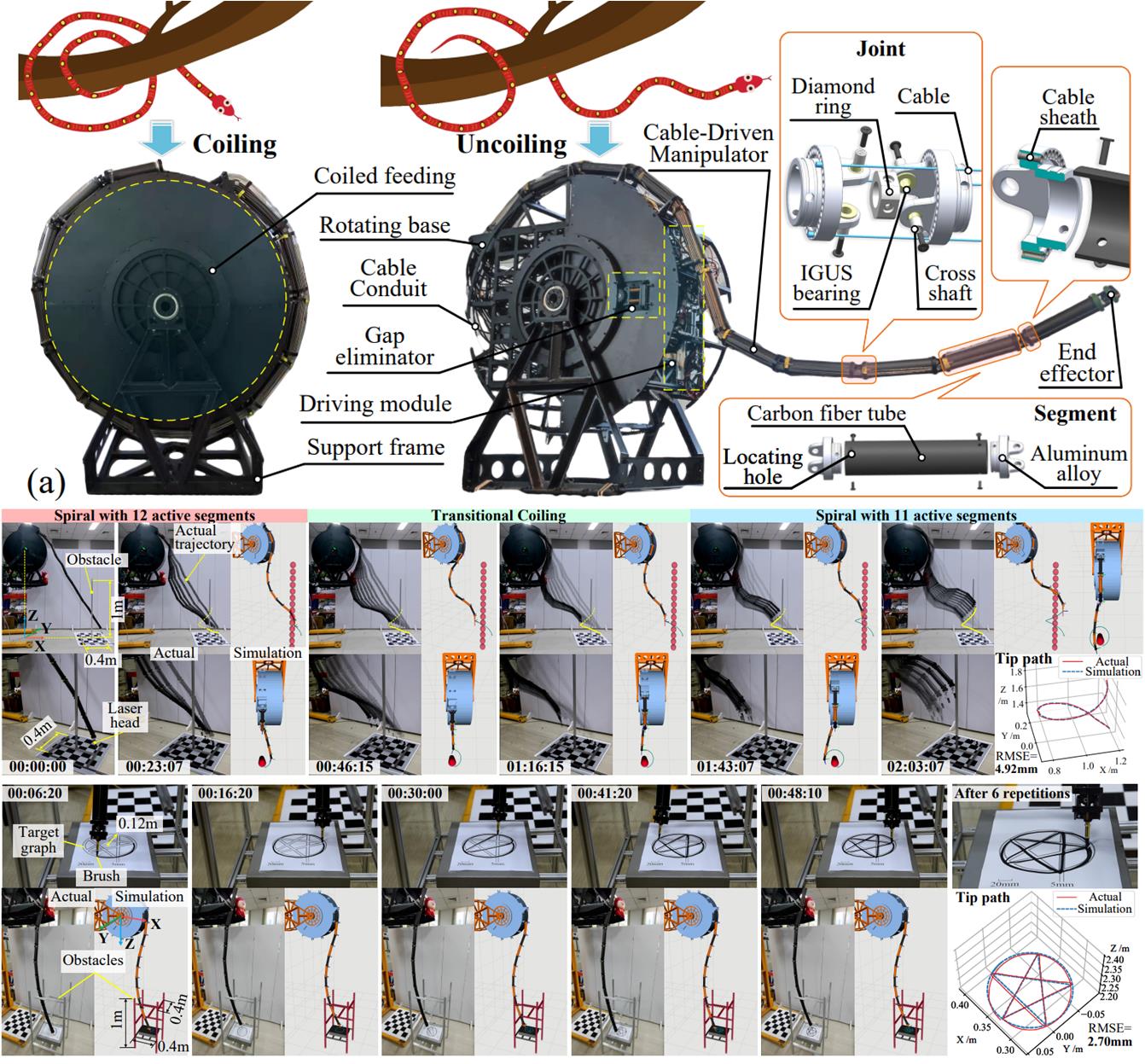
A Constrained Path Following Method for Snake-like Manipulators via Controlled Winding Uncoiling Strategy
罗明睿; 田雨农; 曹营华; 陈铭浩; 张延峰; 李恩; 谭民 | 2024, Jan 29 ICRA 2024 | A类(CAA) | B类(CCF) | 机器人顶会 EI检索本论文充分模仿蛇的蜿蜒开卷行为,提出一种新型的面向蛇形操纵器的受限路径跟随方法R-SCP,以实现冗余运动规划的高效和可控。R-SCP可以高效且解析的确定跟随中的关节位置、碰撞区域和运动参数,从而使跟随中的剩余段严格位于基座和路径控制的无碰撞区,且能够根据限制平滑模型关联的控制参数。





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}