Visiting scholar at the Hamline Centre, Imperial College London on flexible/soft surgical medical robots
Recent research on motion planning of hyper-redundant manipulators has been accepted by TII and ICRA2024
Video presentation of research experience:👉Watch videos
EDUCATION
University of Chinese Academy of Sciences (UCAS)2020 - Now | Control Theory and Control Engineering | Ph.D. StudentGPA:3.85/4.0
I studied under researchers Li En and Tan Min, researching system design, intelligent control, planning, and perception of bionic redundant manipulators. I have published 3 SCI papers in journals such as T-Mech, TII, 3 EI papers in conferences like ICRA, IROS, 4 patents, and 3 software copyrights. I have won the “Excellent Student” award twice in a row and have served as a member of the academic department of the student union.
Beijing University of Technology (BJUT)2016 - 2020 | Mechanical Engineering (Major) Robot Engineering (Minor) | B.E. DegreeGPA:3.93/4.0
During my school years, I have won various scholarships at the school, city, and national levels, and have won prizes in various competitions. I have hosted or participated in many college student innovation projects and published many patents and software copyrights. I have obtained certificates for CET-4, CET-6, and computer level certification. I have served as the president of the Science and Technology Association and the student in charge of the Innovation Laboratory.
Mingrui Luo; Yunong Tian; Yinghua Cao; En Li; Min Tan; et al. | 2024, Jan 29ICRA 2024 | IEEE Conference(TOP) EI Index
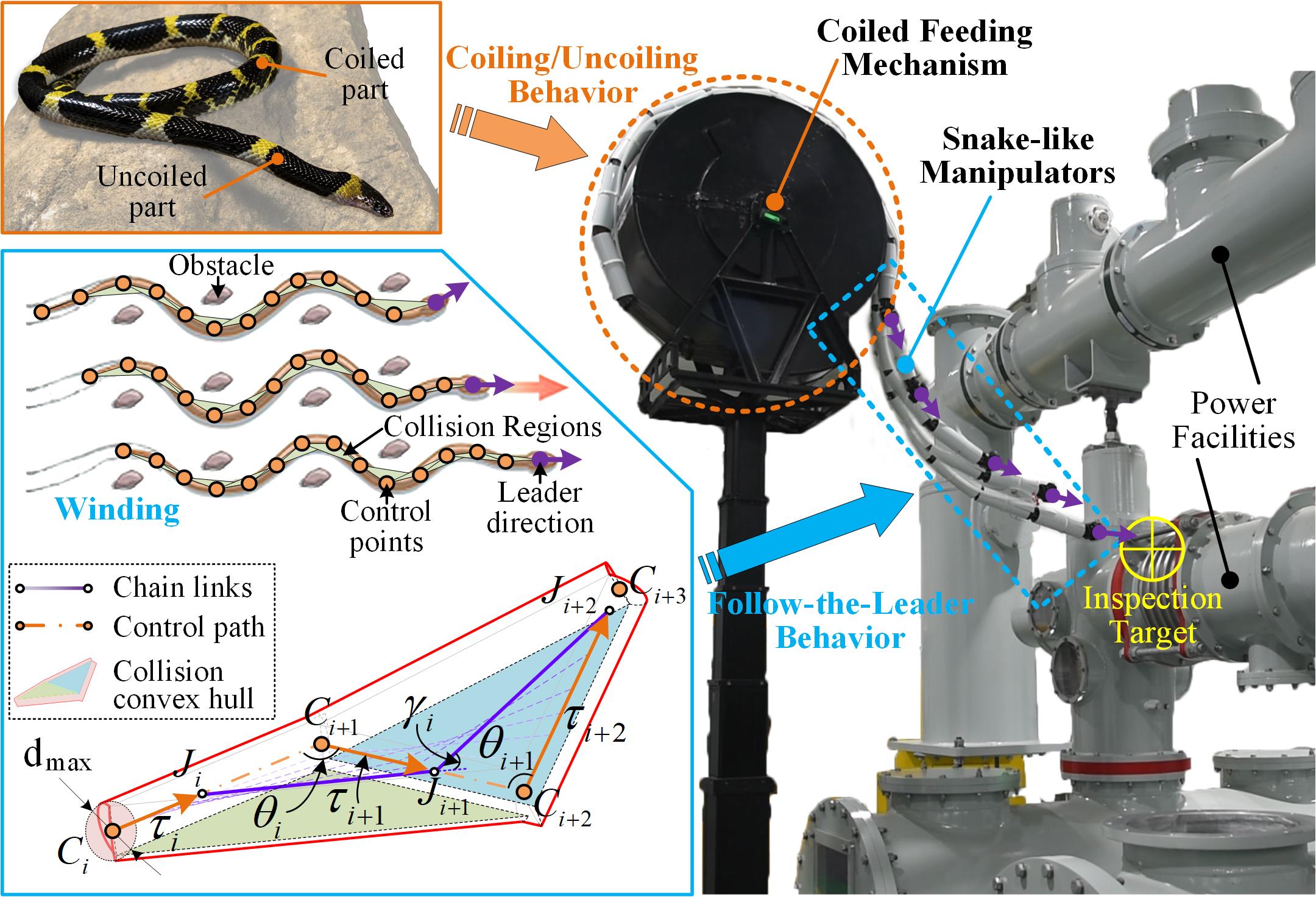
This paper fully imitates the winding and uncoiling behavior of snakes and proposes a novel constrained path following method R-SCP for snake-like manipulators to achieve efficient and controllable redundant motion planning.
Mingrui Luo; Yunong Tian; En Li; Minghao Chen; Min Tan | 2023, Dec 16IEEE Transactions on Industrial Informatics | IF: 12.3/Q1(TOP)
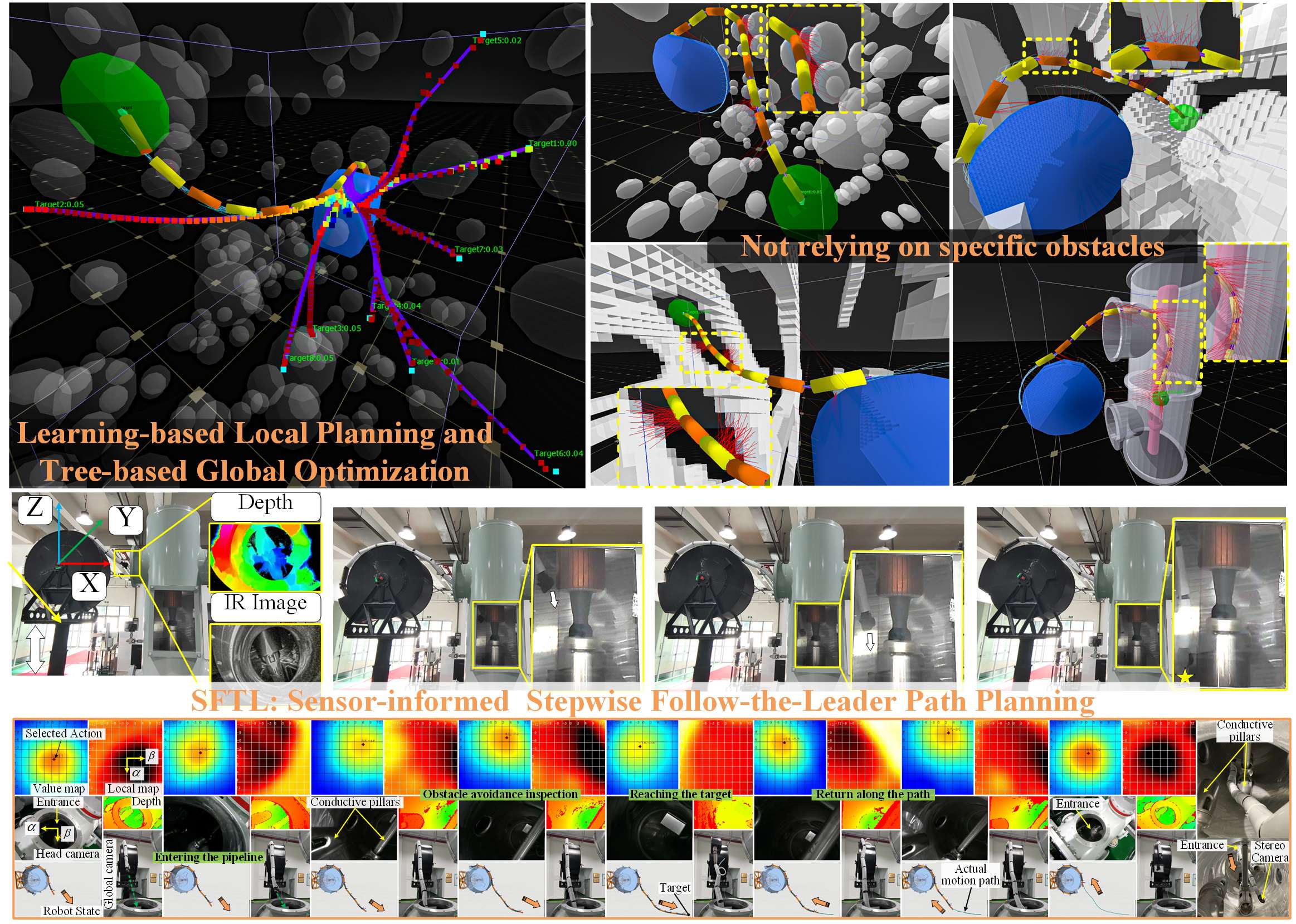
The paper introduces the SFTL algorithm for confined-space tasks with CDHRMs. Utilizing reinforcement learning and dynamic optimization, SFTL achieves a 96% success rate in simulations and experiments, offering a robust planning framework for industrial CDHRM applications.
Mingrui Luo; Yunong Tian; En Li; Minghao Chen; Min Tan; et al. | 2023, July 1IROS 2023 | IEEE Conference(TOP) EI Index
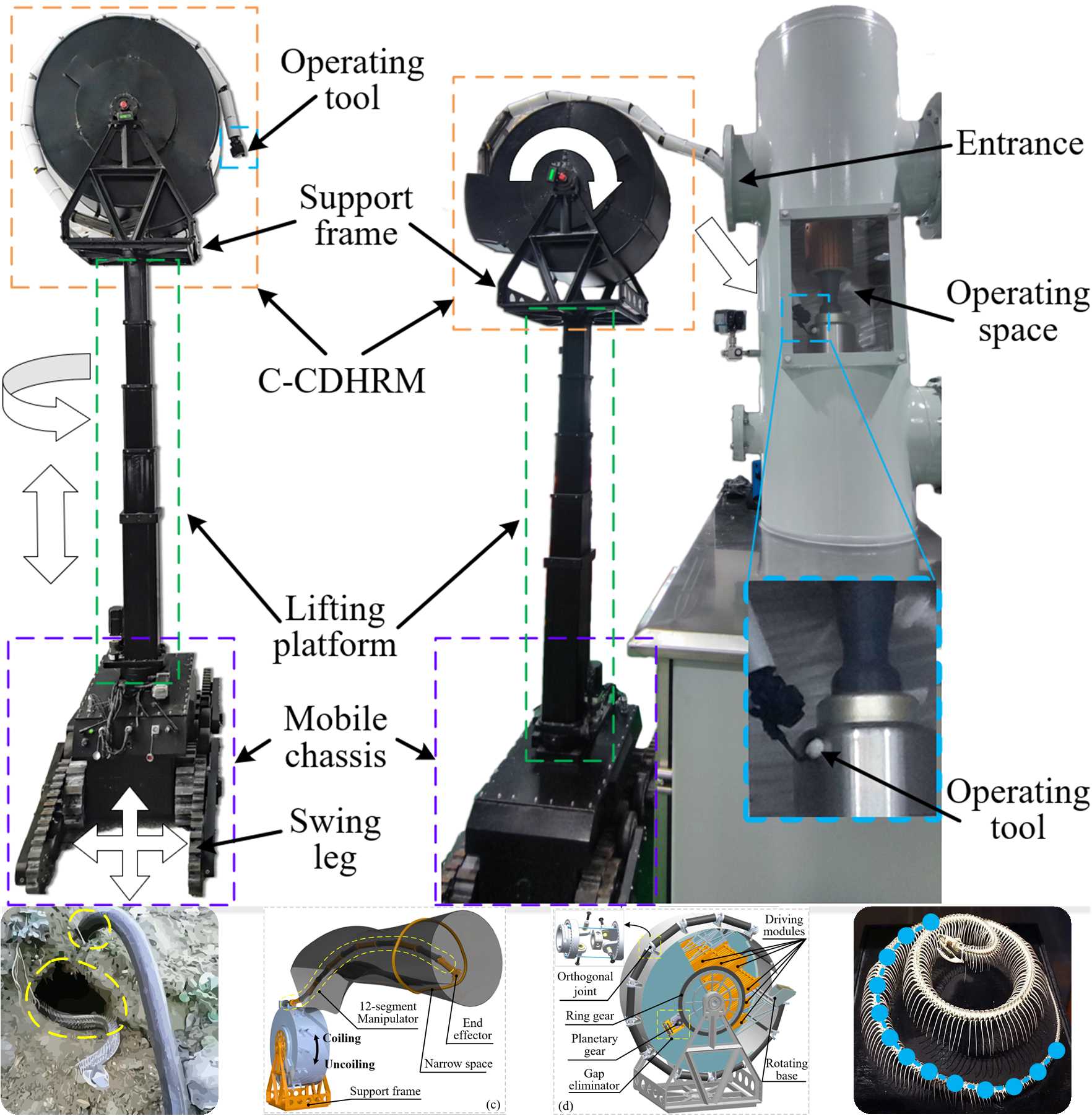
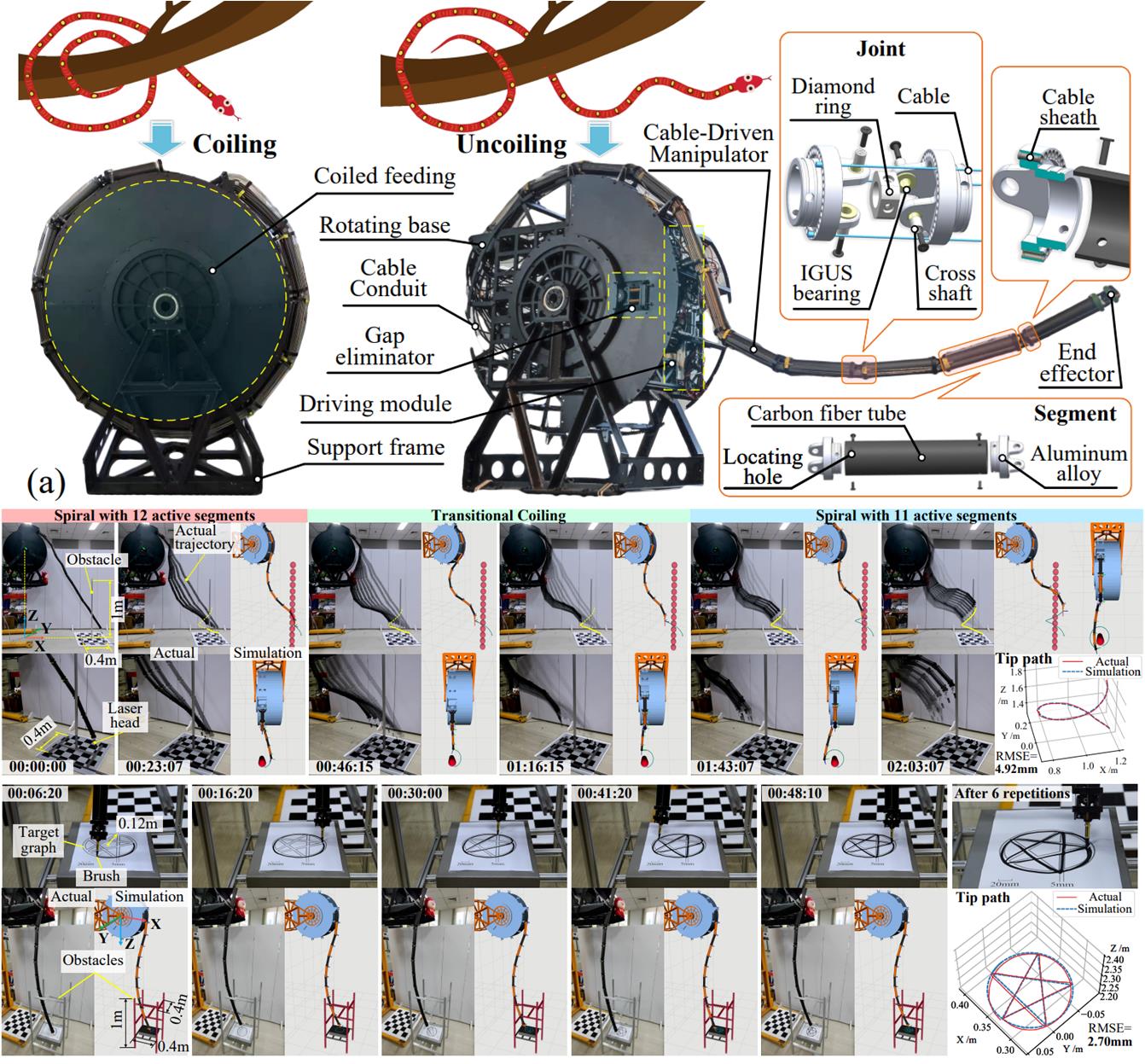
In this paper, we propose a coiled cable-conduit-driven hyper-redundant manipulator (C-CDHRM) with great slenderness
and flexibility. By imitating the structure and behavior of a constricting snake, it can be uncoiled sequentially from a coiled storage state, led by the head. In terms of control methods, we propose a multi-layer control system that can make remote operations more accurate and reliable.
Mingrui Luo; En Li; Aoshun Zhang; Min Tan; Zize Liang | 2023, Mar 7IEEE/ASME Transactions on Mechatronics | IF: 6.4/Q1(TOP)
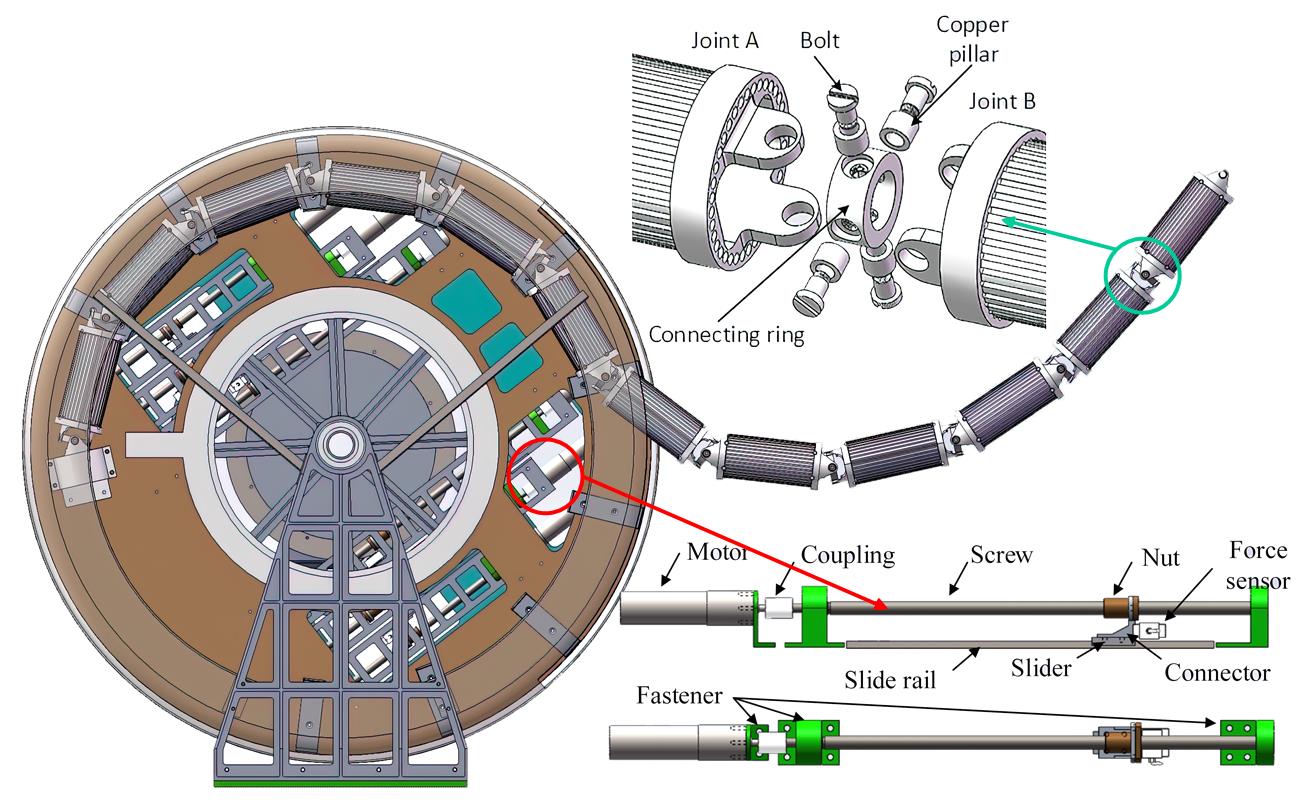
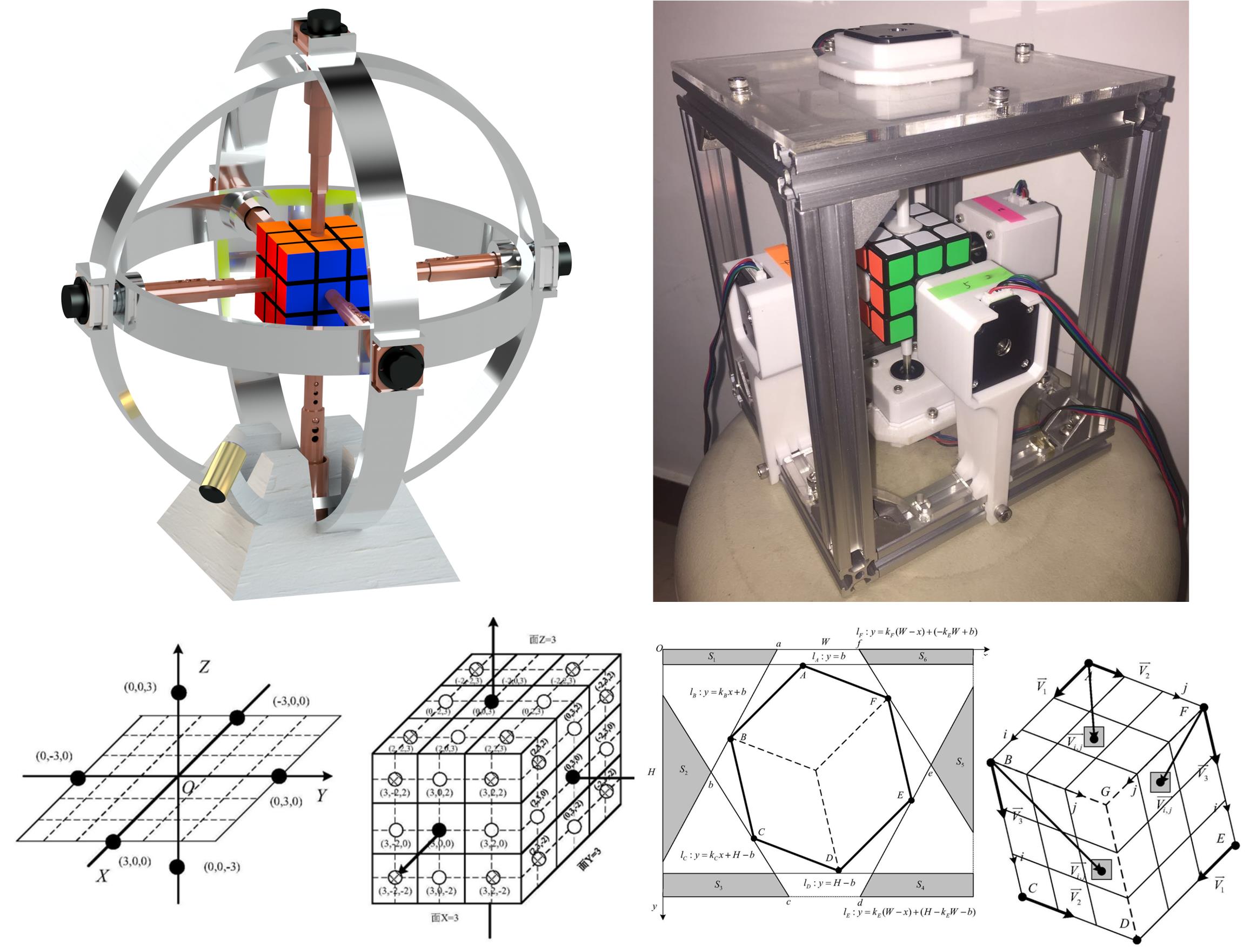
In this paper, a highly compact coiled CDHRM (C-CDHRM) that mimics the coiling behavior of snakes is designed, including 12 fully-constrained rigid bodies, 36 double-screw retractors, and a coiled feeding mechanism that can coil or uncoil according to task needs. The kinematic model and planning method we proposed enable the bioinspired coiled manipulator to exert excellent dexterity and maneuverability.
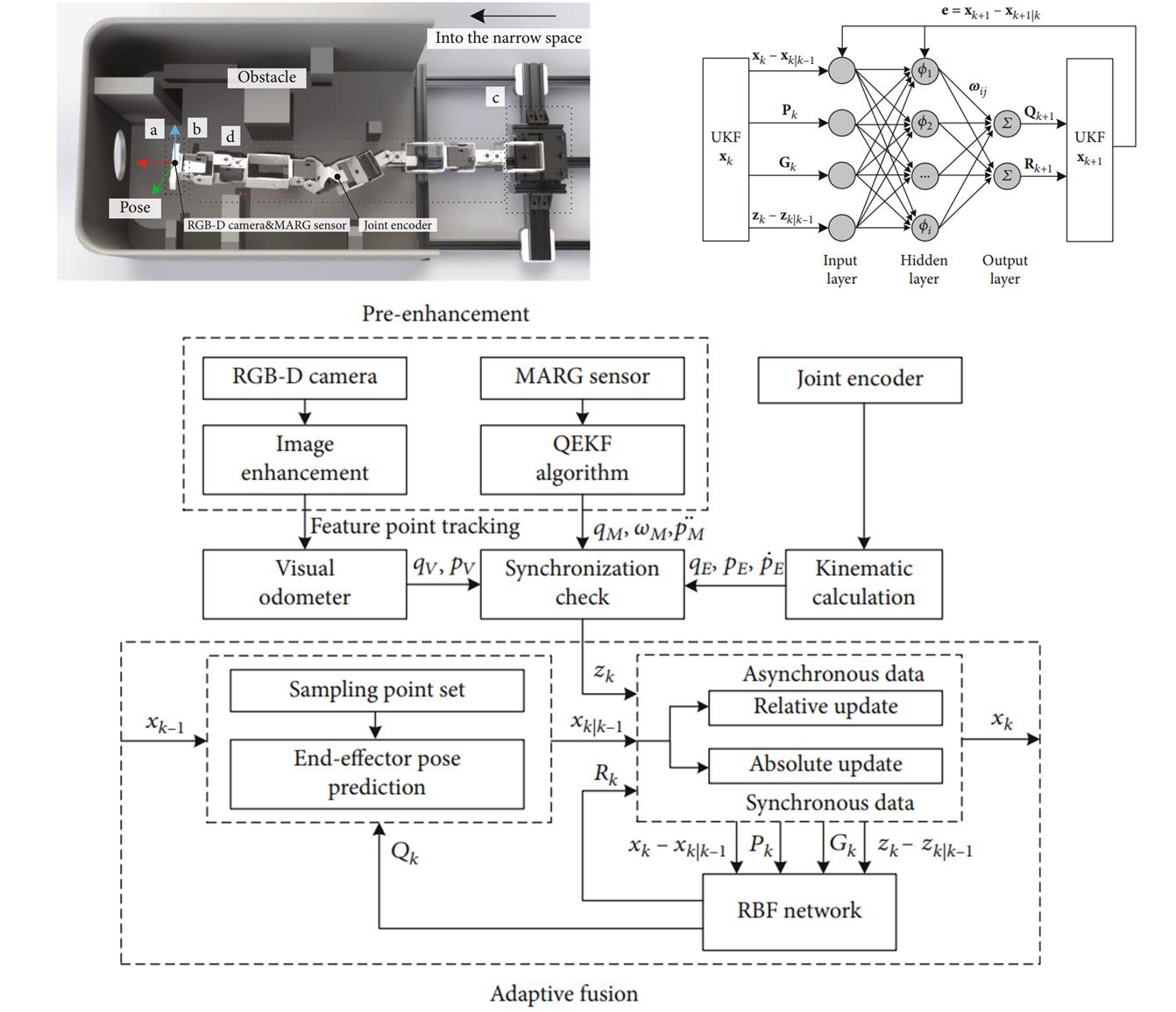
Mingrui Luo; En Li; Rui Guo; Jiaxin Liu; Zize Liang | 2021, Mar 25Journal of Sensors | IF: 2.336/Q3
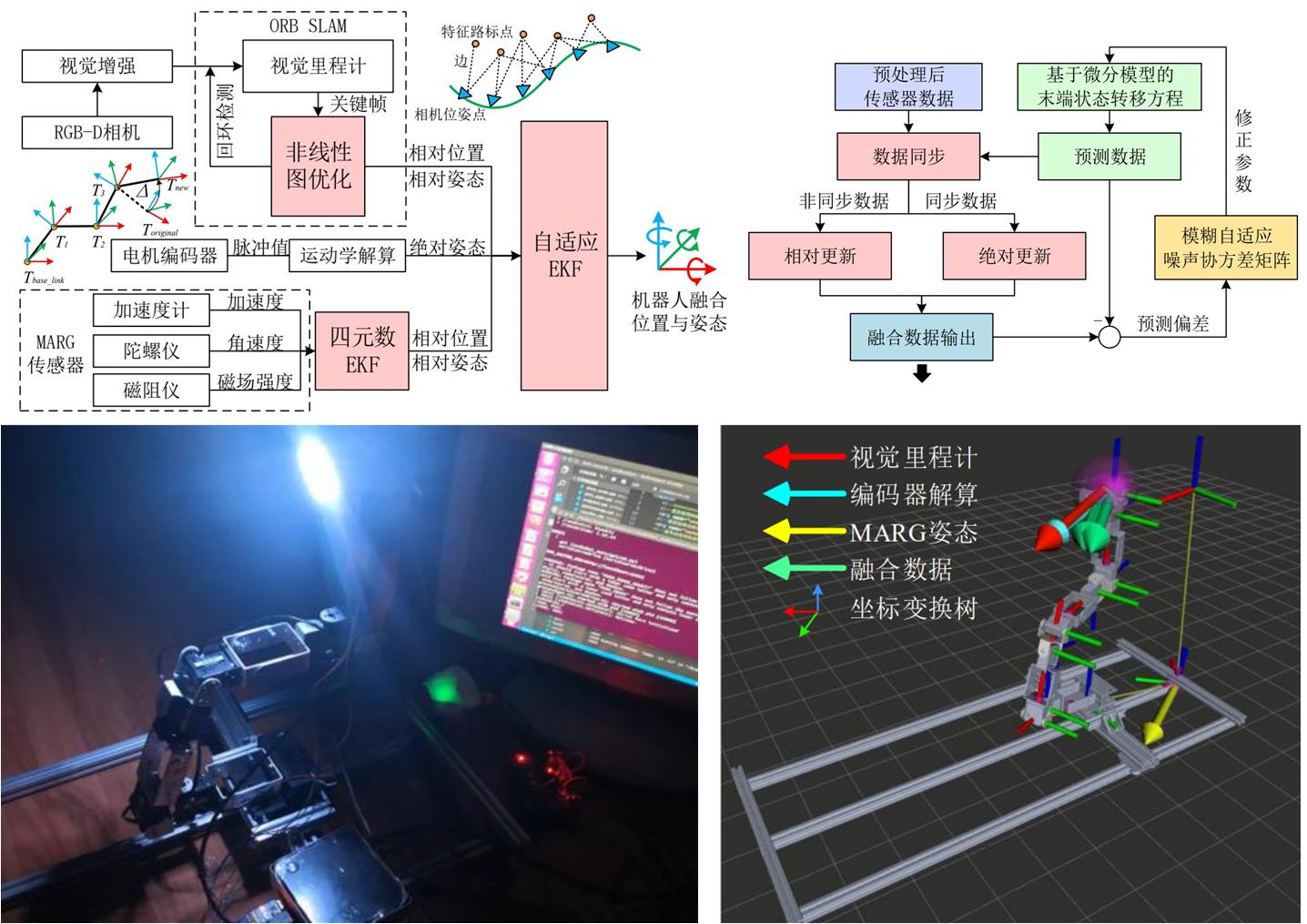
In this paper, a pose estimation method is proposed with the fusion of vision sensors, inertial sensors, and encoders. The proposed method achieves better performances on estimation error and update frequency than the original extended Kalman filter (EKF) and unscented Kalman filter (UKF) algorithm, especially in complex environments.
Mingrui Luo; En Li; Rui Guo; Shengchuan Li; Cunfeng Kang | 2020, Nov 6CAC 2020 | IEEE Conference EI Index
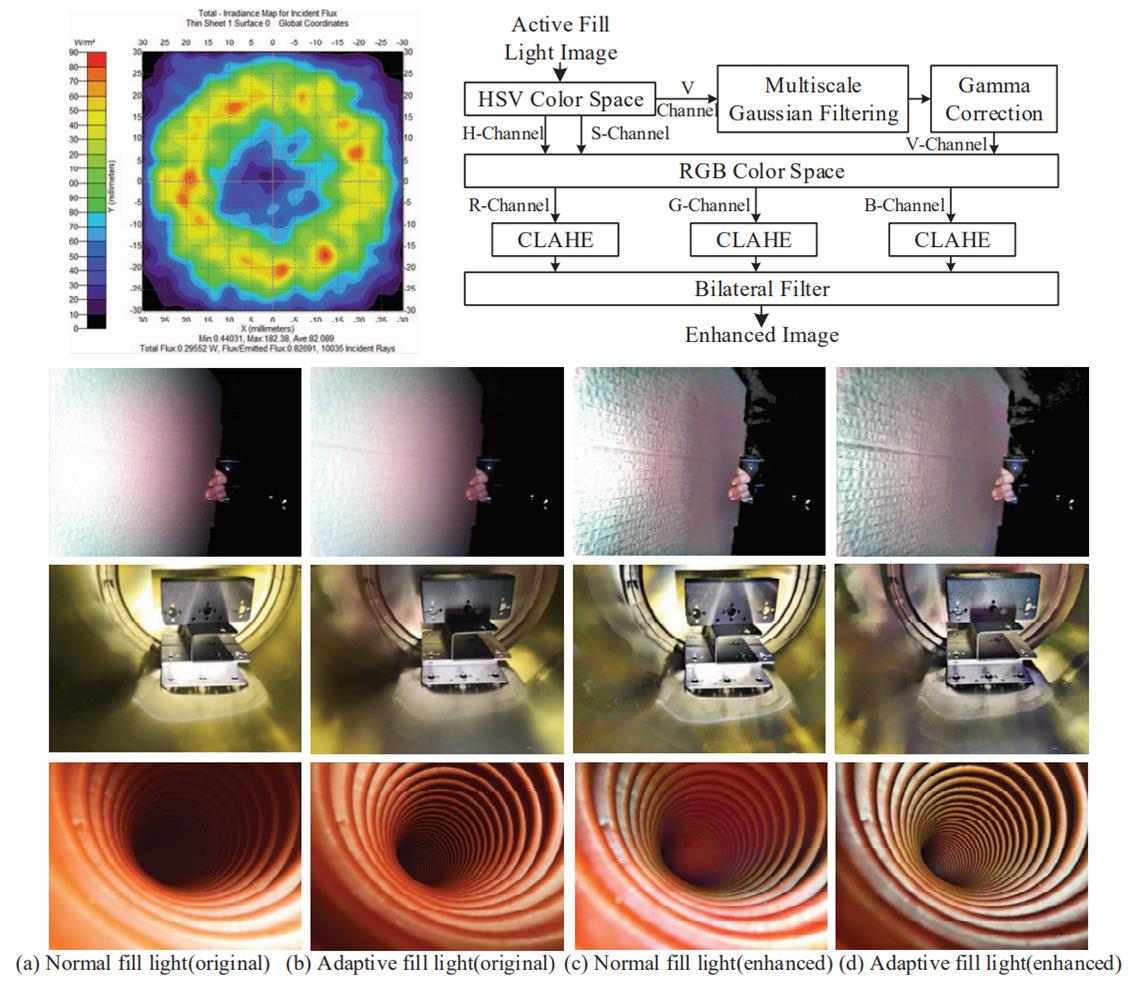
This paper proposes an active and adaptive image enhancement method, including the distributed light source model, the difference in brightness between frames, contrast limited adaptive histogram equalization, bilateral filter, and fuzzy inference parameter self-adjustment method. The method proposed in this paper can effectively enhance the images in the low-light and narrow environment.
Jiaxin Liu; Mingrui Luo; Rui Guo; Shengchuan Li; En Li; et al. | 2023, May 5Patent Grant | ZL 2022 1 0266769.2
The GIS cavity operation device provided by the invention effectively improves the execution efficiency of GIS cavity operation tasks, reduces the labor input and reduces the safety risk caused by manual maintenance.
En Li; Aoshun Zhang; Mingrui Luo; Guodong Yang; et al. | 2023, Mar 31Patent Grant | ZL 2021 1 1371378.9
The rope-driven serpentine robot arm control method proposed by this invention adjusts the joints closer to the root of the arm in priority sequence according to priority, avoiding the coupling problem of ropes when adjusting multiple ropes simultaneously, and correctly completes the control of ropes.
En Li; Mingrui Luo; Guodong Yang; Zize Liang; Min Tan; et al. | 2023, Feb 17Patent Grant | ZL 2020 1 1190396.2
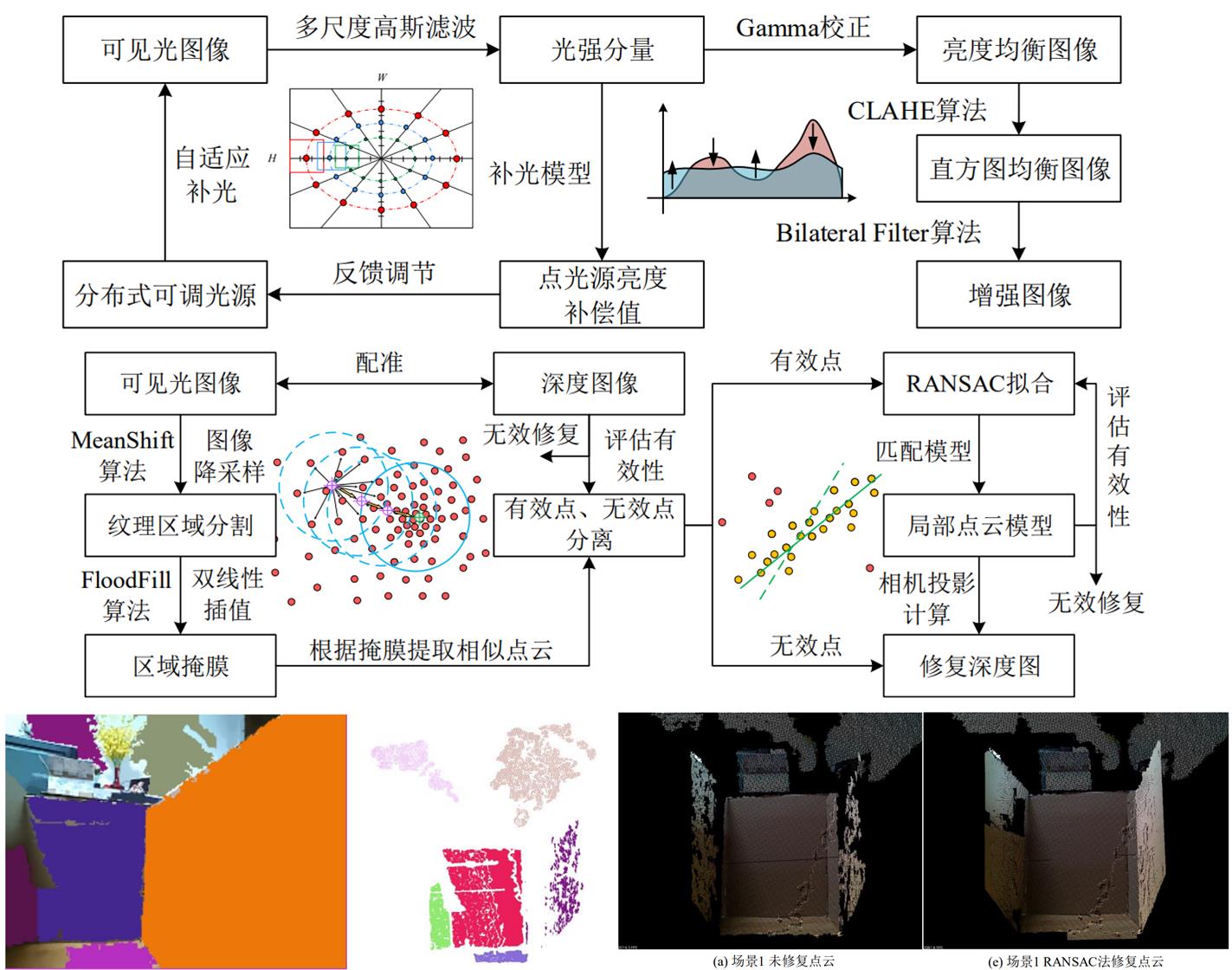
The method and the device can enhance and repair the color image and the depth image of the depth camera at the same time, and further improve the adaptability of the depth camera to more complex and severe environments.
Mingrui Luo; En Li; Rui Guo; Jiaxin Liu; Guodong Yang; Zize Liang; Min Tan; et al. | 2022, June 21Patent Grant | ZL 2020 1 1195340.6
The invention realizes dense reconstruction and algorithm acceleration on the premise of not losing necessary details of the scene, and is more favorable for application in actual engineering occasions.
En Li; Mingrui Luo; Guodong Yang; Zize Liang; Min Tan; et al. | 2022, Mar 25Patent Grant | ZL 2020 1 1190385.4
The invention is aiming at solving the problem of low accuracy and precision of robot perception and spatial positioning caused by adverse interference conditions of multi-factor synthesis in the environment.
Cunfeng Kang; Mingrui Luo; Chunyang Shi; Donglin Chen | 2020, July 7Patent Grant | ZL 2020 1 0205243.4
The invention discloses an automatic color filling and abstracting method for a three-order magic cube, which solves the problem of overhigh color identification cost under the condition of ensuring that the identification efficiency is not changed greatly.
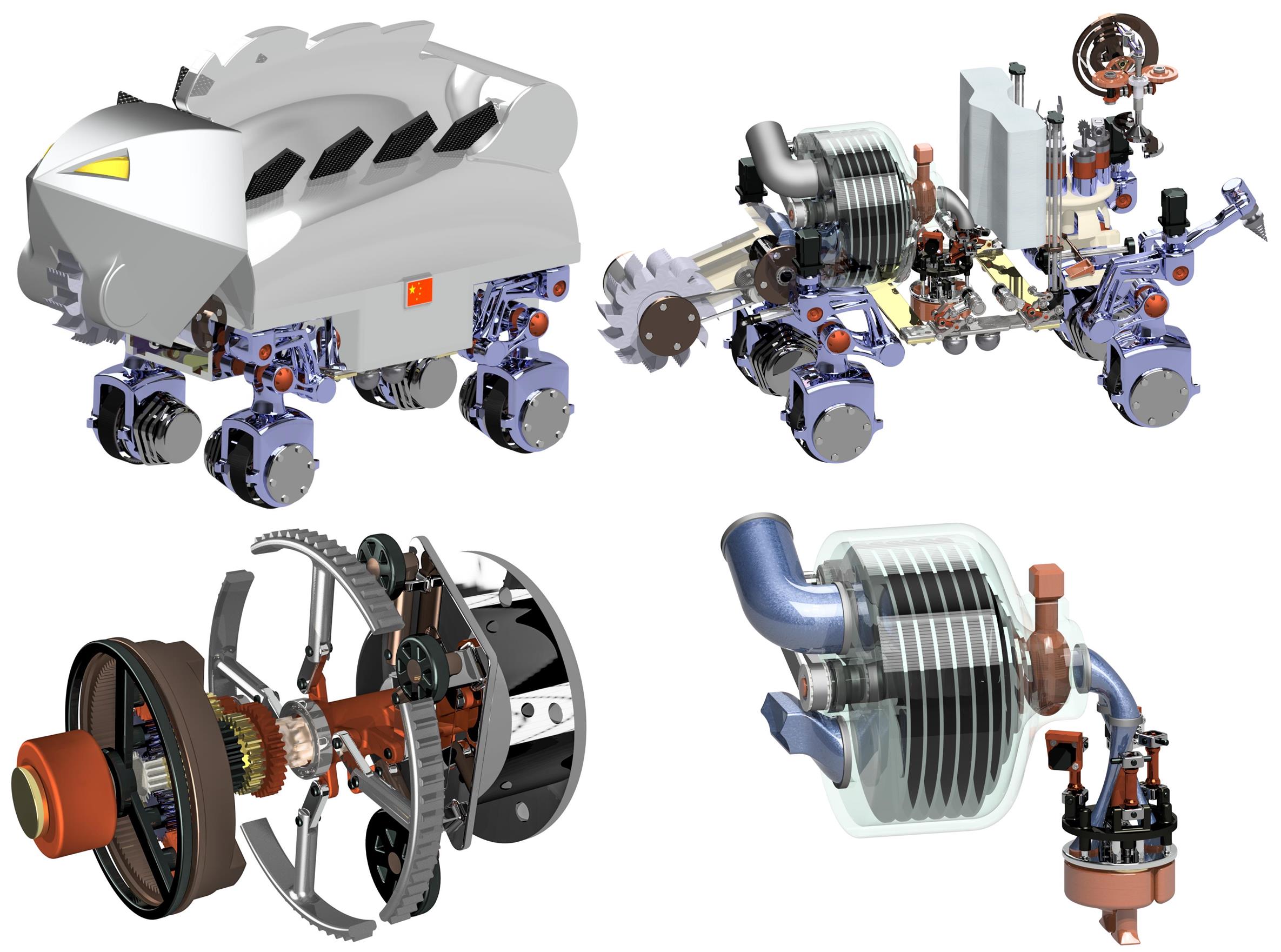
The invention discloses the lunar rover that a kind of auxiliary builds lunar base and lunar rock sample collection, which is broadly divided into four parts, builds feedstock capture system, wall formation system, chassis drive system and sample acquisition system.
Shuwen Sun; Mingrui Luo; Zhaoyang Shi; Jun Sun; Mengxuan Gao; | 2018, Sep 28Patent Grant | ZL 2018 1 1136164.1
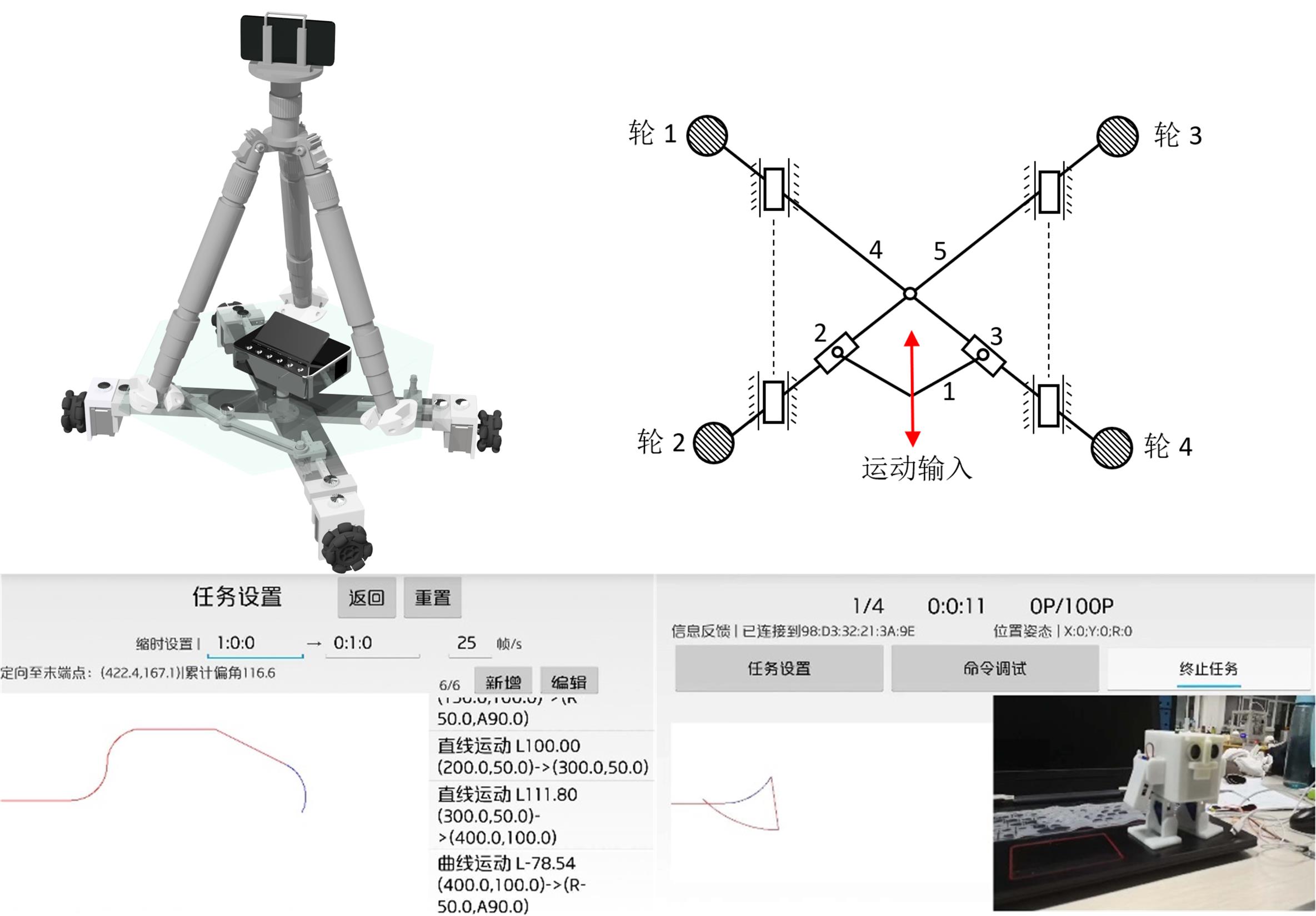
The present invention provides a kind of automation equipment for realizing a wide range of time-lapse photography and control method, greatly reduces the shooting difficulty of a wide range of time-lapse photography.
Jianhua Wang; Mingrui Luo; Zixiao Liu; Yuhan Xin; | 2018, May 14Patent Grant | ZL 2018 1 0457020.X
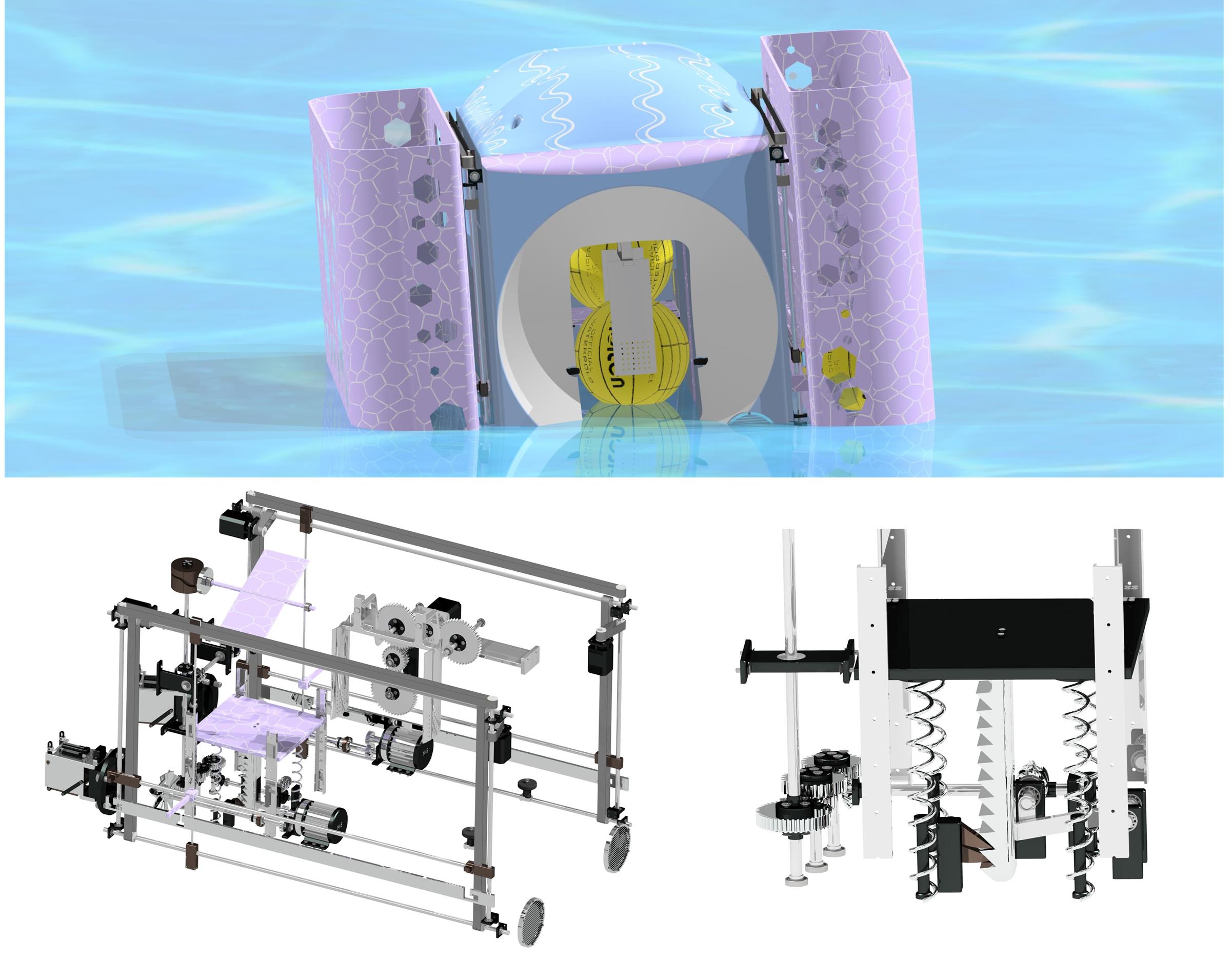
The present invention is water polo machine for automatically recovering device people, and it is most of that mechanism is divided into four: Robot actuating unit, water polo aggregation mechanism, water polo transport establishment, water polo collecting mechanism.
Software Copyright
Software for detection and classification of glue defectsYunong Tian;En Li;Mingrui Luo;et al. | CN. Copyright No.2022SR0606186
Multilevel 3D scene reconstruction and segmentation softwareEn Li;Mingrui Luo;et al. | CN. Copyright No.2021SR0524534
Indoor positioning and mobile grabbing system for elderly robot assistanceCunfeng Kang;Mingrui Luo;Zixiao Liu | CN. Copyright No.2017SR611308
AWARD
“Excellent Student Model” title of University of Chinese Academy of Sciences in 2024
2023 "Challenge Cup" Capital University Extracurricular Academic and Technological Works Competition “First Prize”
“Excellent Student” title of University of Chinese Academy of Sciences in 2022
“Excellent Student” title of University of Chinese Academy of Sciences in 2021
Outstanding Graduate of Beijing and Outstanding Graduate of Beijing University of Technology ▛Cert.▟
Excellent Learning Award, Innovation and Entrepreneurship Award, and Excellent Student of Beijing University of Technology
First Prize of the 5th Student Extracurricular Academic Works Competition of Beijing University of Technology
First Prize of the 10th Challenge Cup Capital University Extracurricular Academic Science and Technology Works Competition
First Prize of the 2019 National College Student Mechanical Product Digital Design Competition ▛Cert.▟
Honorable Mention of the 2019 American College Student Mathematical Modeling Competition ▛Cert.▟
Excellent Learning Award, Innovation and Entrepreneurship Award, Excellent Student, and Excellent Student Cadre of Beijing University of Technology
National Scholarship and Yang Shuzi Academic Scholarship▛Cert.▟
First Prize of the 2018 National College Student Mathematical Modeling Competition (Beijing Division)
Silver Award of the 2018 "Challenge Cup" Capital University Student Entrepreneurship Competition
Excellent Learning Award, Science and Technology Innovation Award, Excellent Student, and Yang Shuzi Academic Scholarship of Beijing University of Technology
First Prize of the 3rd Student Extracurricular Academic Works Competition of Beijing University of Technology
First Prize of the 2017 China Robot Competition ▛Cert.▟
EXPERIENCE
Research and Application of Operation Robot System for Power Industry
National Key Research and Development Program (2018YFB1307400) | Core Student Member
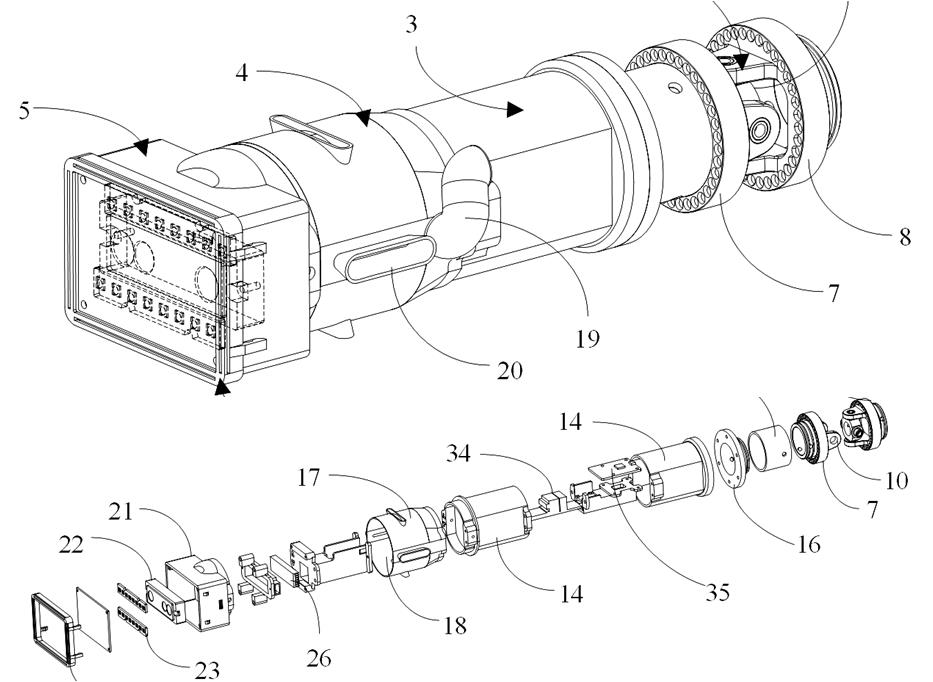
Developed an inspection robot for gas-insulated switchgear in power substations. The robot consists of an all-terrain mobile chassis, a multi-level lifting platform, and a cable-driven manipulator with a length of 2.2 meters, 24 degrees of freedom, and a diameter of 50 millimeters.
Participated in the mechanism optimization of the manipulator, which imitates the coiling behavior of snakes and can coil to reduce storage space or uncoil to expand the working range.
Participated in the design of the control system for the manipulator, mainly using CANOpen communication and realizing 36-axis high-precision synchronous control based on CODESYS and ROS.
Participated in the planning algorithm design for the manipulator, using a follow-the-leader biomimetic strategy and Multi-constraint redundant inverse kinematics to control the tip pose, meeting the needs of narrow-space obstacle avoidance operations.
Research of a Narrow-space Coating Robot for Application in Aviation Manufacturing
Major enterprise Project | Core Student Member
Developed a narrow-space coating robot, which consists of a 6-degree-of-freedom rigid manipulator and a 20-degree-of-freedom flexible manipulator.
Participated in the design of the control system for the robot, using Ethercat as the main communication method to establish the collaboration between the rigid and flexible arms, and implemented CATIA's digital twin interaction through OPC UA.
Participated in the development of algorithms for seam positioning and quality assessment, which uses computer vision to locate seams and provide guiding paths for the kinematic planning system, as well as evaluate the quality of the coating with the YOLO algorithm.
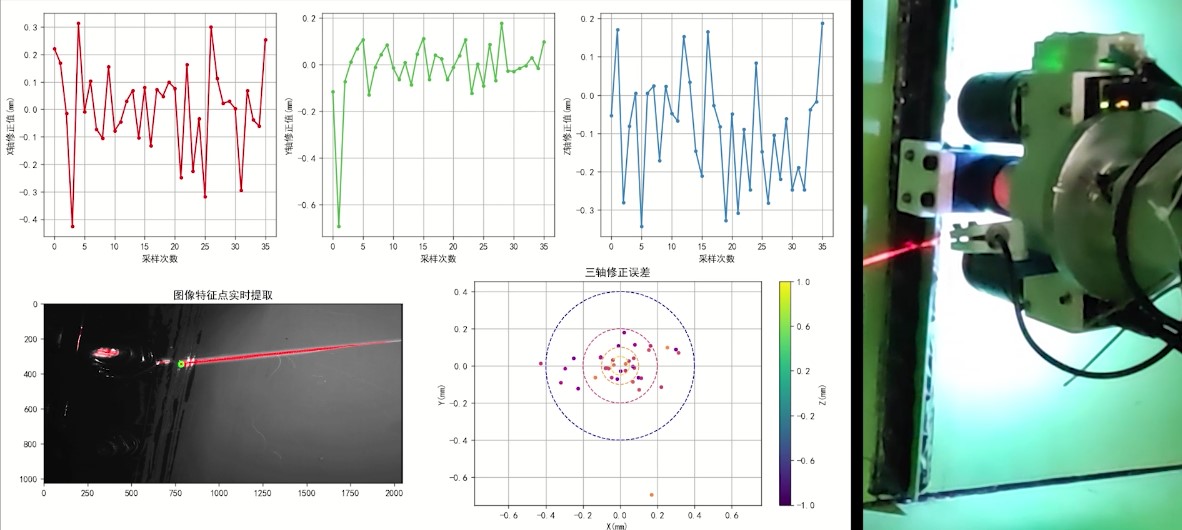
Research on Environment Perception and Reconstruction for Robots in Narrow Spaces
National Natural Science Foundation of China (61873267) | Bachelor's Thesis
An active brightness equalization algorithm was developed for low-light environments using a combination of multiscale Gaussian filtering, distributed fill-light modeling, and gamma correction techniques.
A repair algorithm was designed to address point cloud data in narrow blind spots through the utilization of spatial texture features.
A robust algorithm for estimating the end effector pose of a robot was established, which fuses visual odometry, encoders, and MARG sensors using a fuzzy adaptive EKF based on a differential motion model.
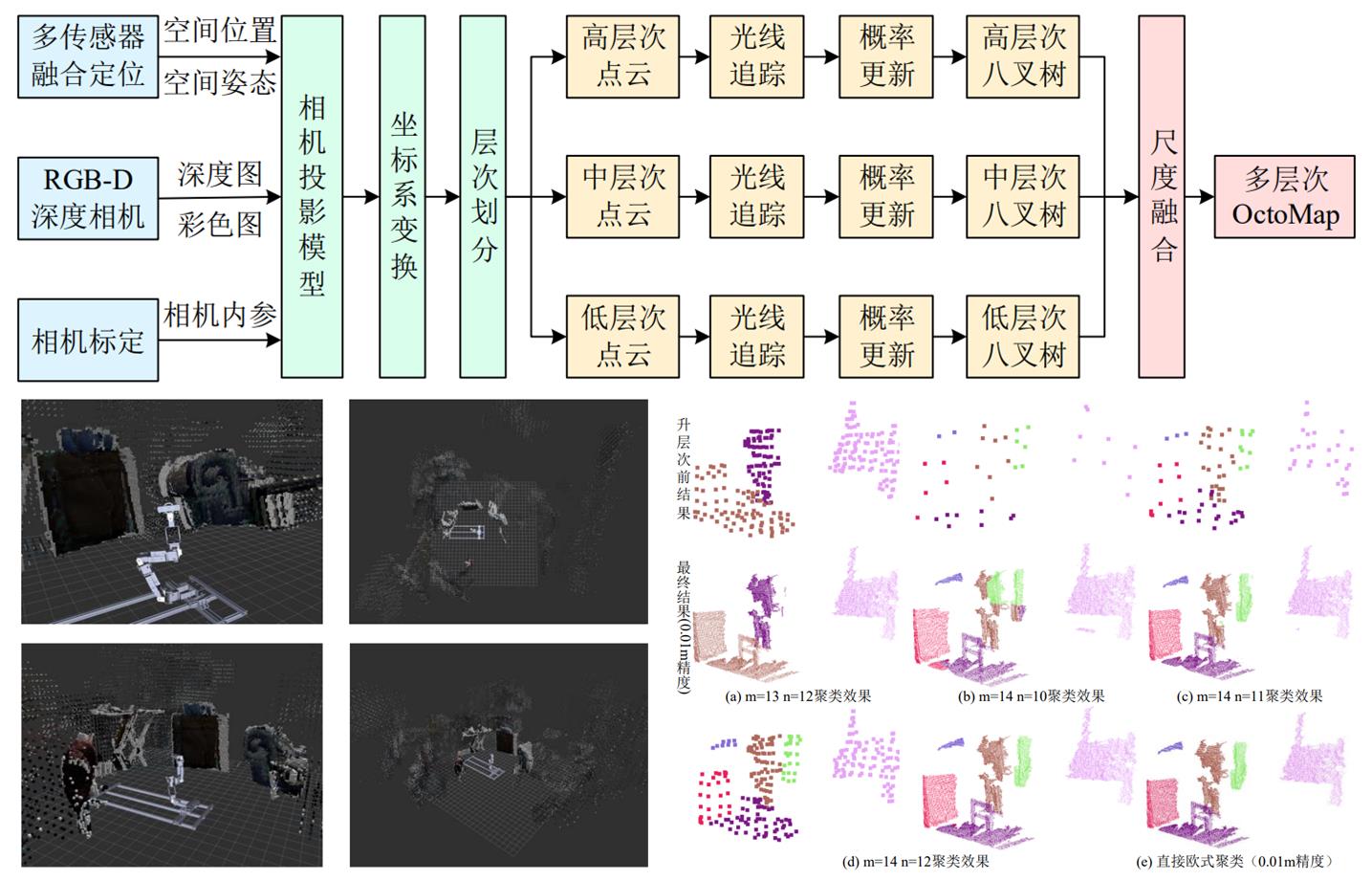
A multi-level reconstruction method for scenes was designed based on the OctoMap framework, which achieves real-time reconstruction of large-scale dynamic scenes while preserving essential details.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}